
輔助駕駛
隨著科學技術的不斷進步,輔助駕駛的應用前景越來越廣泛。未來,輔助駕駛車輛可能會成為城市交通的重要組成部分,與傳統交通方式相互配合,實現更加高效、智能的出行。同時,輔助駕駛技術也將推動汽車產業的轉型升級,促進相關產業的發展,如車載夜視系統、激光雷達系統等。
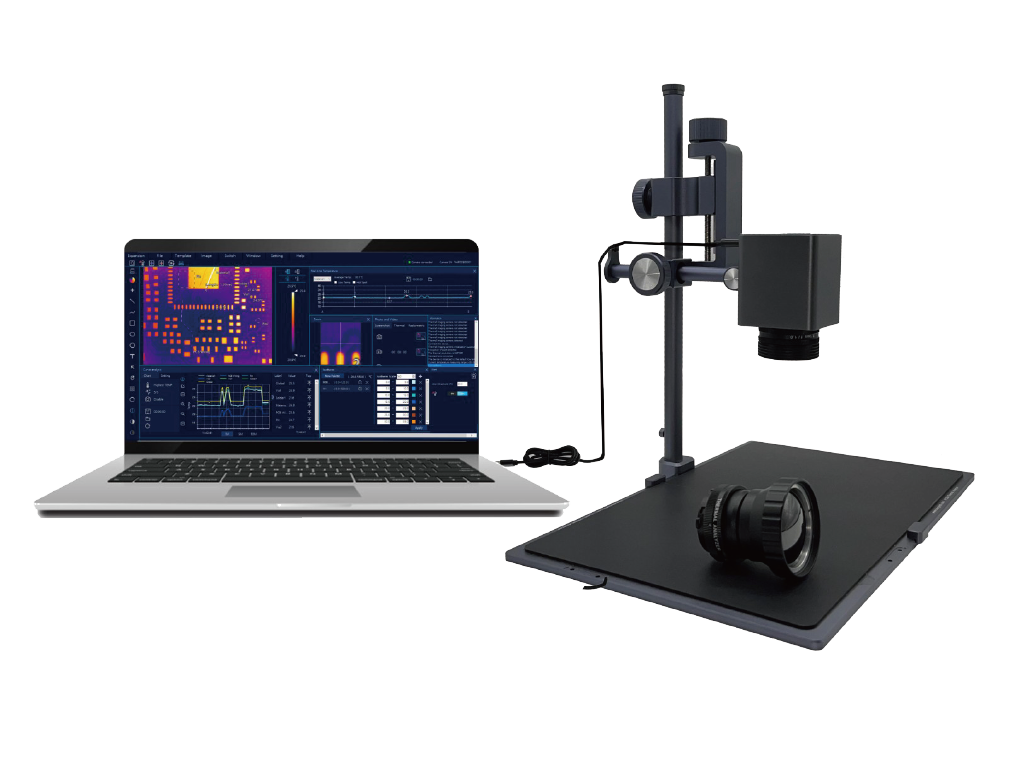
車載夜視系統
紅外熱成像技術在車載夜視系統中發揮著重要作用,不僅提高了車輛的感知能力,還為駕駛安全提供了額外的保障。隨著技術的進步和應用的深入,紅外熱成像技術有望在未來的車載夜視領域發揮更大的作用。
紅外熱成像技術能夠在低照度、雨雪、煙塵、霧霾等惡劣環境下清晰成像,有效提高車輛的全時感知能力;紅外熱成像技術對生命體具有高敏感度,可在夜間或惡劣天氣條件下準確檢測出行人或動物的存在,及時進行預警或避讓,提高行駛安全;紅外熱成像技術可作為駕駛員的輔助視覺,在夜間駕駛、強光照射、雨霧天氣、會車眩光等特定情況下幫助駕駛員感知周圍環境,提高駕駛安全;紅外熱成像技術不受眩光、霧霾、煙塵等環境因素的影響,具有強大的抗干擾能力,增強了車載夜視系統的可靠性;紅外熱成像技術可以與攝像頭、雷達、激光雷達等其他傳感器數據融合,提高車載夜視系統的冗余性和容錯性,提高決策的效率和準確度。
多家車企已經開始在新車中批量搭載紅外系統,這表明紅外熱成像技術在車載夜視系統中具有廣泛的應用前景。
激光雷達系統
激光雷達系統在輔助駕駛中發揮著至關重要的作用。
1、環境感知與建模
激光雷達通過發射激光束并接收反射回來的信號,能夠精確測量車輛周圍物體與自身的距離、角度和方位等信息,構建出詳細的三維空間模型。例如,在行駛過程中,可準確感知前方道路、建筑物、樹木、其他車輛等物體的位置和形狀。激光雷達能夠快速掃描周圍環境,實時跟蹤目標物體的運動狀態和變化,如其他車輛的行駛速度、方向以及行人的移動軌跡等,為輔助駕駛系統提供及時的環境動態信息,以便做出準確的決策。
2、目標檢測與識別
激光雷達可精準識別出行駛路徑上的各種障礙物,包括靜態的障礙物(如路障、墻壁、電線桿等)和動態的障礙物(如其他車輛、行人、動物等),并確定其位置、大小和形狀,幫助車輛提前規劃避讓路徑。
交通標志和信號識別:可以識別交通標志(如限速標志、停車標志、路口指示標志等)和交通信號燈的狀態,輔助車輛遵守交通規則,做出正確的行駛決策,如在紅燈時停車、根據限速標志調整車速等。
3、定位與導航
結合全球定位系統(GPS)、慣性測量單元(IMU)等其他傳感器的數據,利用激光雷達獲取的環境信息進行多傳感器融合定位,提高車輛定位的精度和可靠性,確定車輛在地圖上的準確位置。根據感知到的環境信息和目標位置,為車輛規劃出安全、高效的行駛路徑,避開障礙物和危險區域,引導車輛順利到達目的地。例如,在城市道路中選擇最佳的行駛路線,在高速公路上進行合理的車道變換和超車決策等。
4、可通行空間檢測
激光雷達可明確車輛周圍可安全行駛的區域,即可通行空間。通過對道路邊界、障礙物間隙以及空曠區域的檢測和分析,確保車輛在行駛過程中始終處于安全的區域內,避免駛入不可通行的區域,如坑洼地帶、施工區域等。
5、多傳感器標定
由于輔助駕駛車輛通常配備多種類型的傳感器(如攝像頭、毫米波雷達等),激光雷達可以用于這些傳感器之間的標定,確定它們在車輛坐標系下的相對位置和姿態關系,使得不同傳感器獲取的信息能夠準確地融合和匹配,從而為輔助駕駛系統提供更全面、準確的環境感知信息。
6、仿真與測試
在輔助駕駛系統的開發和測試過程中,激光雷達可以為仿真平臺提供真實的環境數據,模擬各種復雜的駕駛場景和路況,幫助開發人員驗證輔助駕駛算法的性能和可靠性,降低實際路測的成本和風險,提高開發效率。
 400-623-5308(9:00-12:00;13:00-17:30)
400-623-5308(9:00-12:00;13:00-17:30)




























































 您的信息正在受保護
您的信息正在受保護